Detection based on “Ultrasonic Waves”
What is an ultrasonic sensor?
This section provides a detailed look at ultrasonic sensors.
Outline and detection principle
As the name indicates, ultrasonic sensors measure distance by using ultrasonic waves.
The sensor head emits an ultrasonic wave and receives the wave reflected back from the target. Ultrasonic Sensors measure the distance to the target by measuring the time between the emission and reception.
An optical sensor has a transmitter and receiver, whereas an ultrasonic sensor uses a single ultrasonic element for both emission and reception. In a reflective model ultrasonic sensor, a single oscillator emits and receives ultrasonic waves alternately. This enables miniaturisation of the sensor head.
Distance calculation
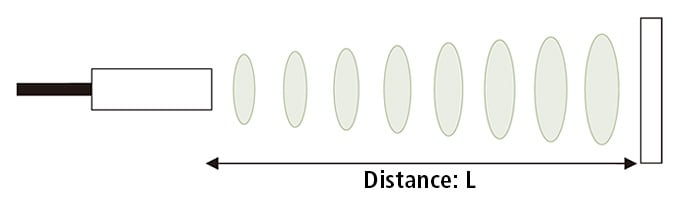
The distance can be calculated with the following formula:
Distance L = 1/2 × T × C
where L is the distance, T is the time between the emission and reception, and C is the sonic speed. (The value is multiplied by 1/2 because T is the time for go-and-return distance.)
Features
The following list shows typical characteristics enabled by the detection system.
[Transparent object detectable]
Since ultrasonic waves can reflect off a glass or liquid surface and return to the sensor head, even transparent targets can be detected.
[Resistant to mist and dirt]
Detection is not affected by accumulation of dust or dirt.
[Complex shaped objects detectable]
Presence detection is stable even for targets such as mesh trays or springs.

-
Detection based on “Contact Measurement”
Principle and types of contact positioning sensors
Contact Positioning Sensors -
Detection based on “Ultrasonic Waves”
Comparison between ultrasonic sensors and optical sensors
Ultrasonic Sensors












